
Blender Synthetic semantic segmentation and CV data: BLAINDER Add-on
Blender Point Cloud Visualizer
Display, edit, filter, render, convert, generate and export colored point cloud PLY files. Works with any PLY file with ‘x, y, z, nx, ny, nz, red, green, blue’ vertex values. Vertex normals and colors are optional.

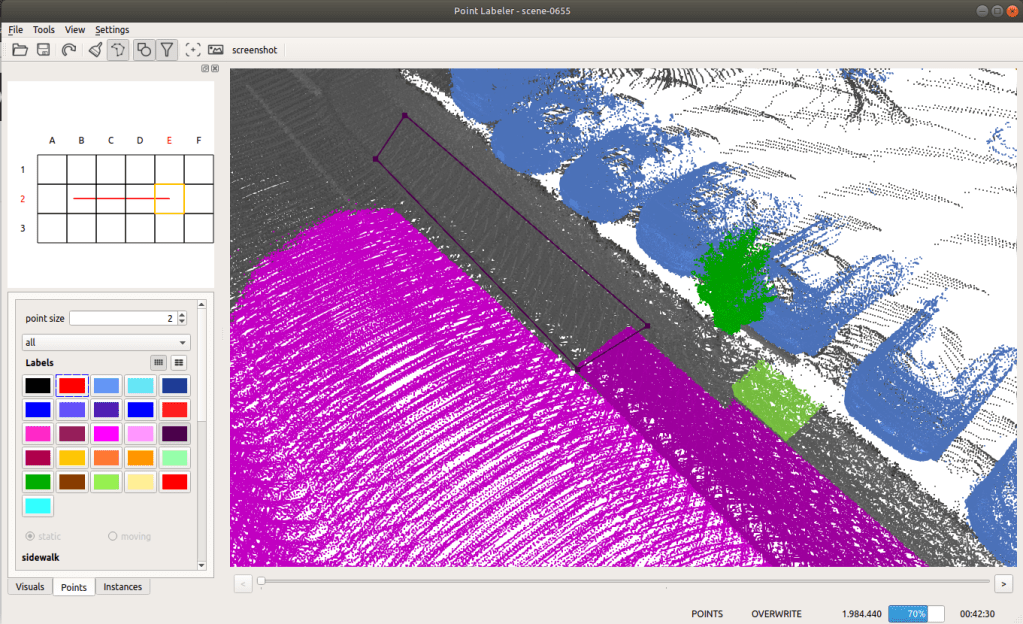
Semantic Kitti Point Cloud Labeler
http://semantic-kitti.org/resources.html#labeling
Tool that allows us to label millions of points. We exploit OpenGL to render, but also process the data efficiently.
Our labeling tool provides the following features and capabilities:
- Different tools to annotate the point cloud data, including polygon-based or brush-based labeling and filtering.
- Human-readable label description files in xml allow to define label names, ids, and colors.
- Show multiple scans, but also single scans for every time step.
- Filter points based on lables, but also position to a adjustable plane.
See our github repository: https://github.com/jbehley/point_labeler for the code and more information.
Point cloud annotation tools
https://github.com/springzfx/point-cloud-annotation-tool
https://github.com/bernwang/latte
VisionLidar
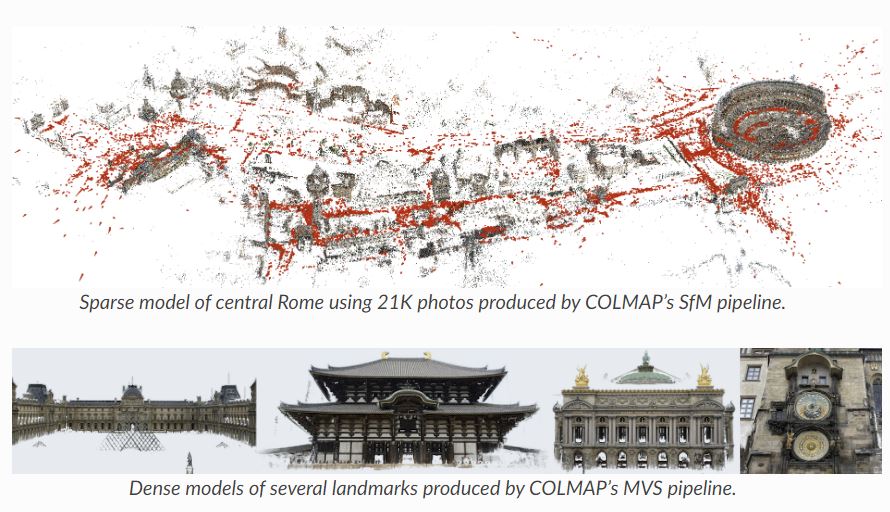
COLMAP general purpose structure from motion and multi-view stereo
Includes a graphical and command-line interface. It offers a wide range of features for reconstruction of ordered and unordered image collections.
A Python library for working with 3D point clouds.
https://pyntcloud.readthedocs.io/en/latest/index.html
Meshroom: Open Source 3D reconstruction software
https://github.com/alicevision/meshroom
Meshlab
The open source system for processing and editing 3D triangular meshes.
It provides a set of tools for editing, cleaning, healing, inspecting, rendering, texturing and converting meshes. It offers features for processing raw data produced by 3D digitization tools/devices and for preparing models for 3D printing.
Extracting a 3D model from google maps
Blender addon photogrammetry
https://github.com/SBCV/Blender-Addon-Photogrammetry-Importer
A Blender addon to import and export Structure-from-Motion (SfM) reconstruction results
